
2026/01/02
- KVKV-X
クォータニオンFUNライブラリ
クォータニオンとは
クォータニオン(Quaternion)は3次元空間の回転を表現するための数学モデルです。
ロボット制御、ドローン制御、姿勢制御、3Dグラフィックスなどで広く使用されています。
オイラー角ではジンバルロックが発生する場合がありますが、クォータニオンではその問題を回避できます。
クォータニオンの利用例
- 携帯の中のジャイロで姿勢をリアルタイムで計算
- ゲームの中の回転はユニティやアンリアルなどのエンジンが計算
- スペースXのロケットが着陸するときの姿勢制御をリアルタイムで計算
- ロボット制御
- 自動運転
- AR(仮想現実)
関連ページ
一覧
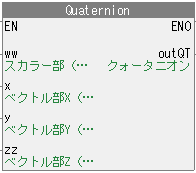
クォータニオン生成 (Quaternion)
Quaternion
KV

KV-X
KV-X
入力
- ww
- スカラー部(実部)
- x
- ベクトル部x(虚部)
- y
- ベクトル部y(虚部)
- z
- ベクトル部z(虚部)
出力
- outQT
- クォータニオン
【例】
入力
- ww
- 1.0
- x
- 2.0
- y
- 3.0
- z
- 4.0
出力
- outQT
- [1.0, 2.0, 3.0, 4.0]
比較 (qtEQ)
qtEQ
KV

KV-X

KV-X
入力
- qt1
- クォータニオン1
- qt2
- クォータニオン2
出力
- result
- 結果
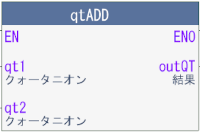
加算 (qtADD)
qtADD
KV
KV-X

KV-X
入力
- qt1
- クォータニオン1
- qt2
- クォータニオン2
出力
- outQT
- 結果クォータニオン
【例】
入力
- qt1
- [1.0, 1.0, 1.0, 1.0]
- qt2
- [0.5, 2.0, 1.0, 0.0]
出力
- outQT
- [1.5, 3.0, 2.0, 1.0]
減算 (qtSUB)
qtSUB
KV

KV-X

KV-X
入力
- qt1
- クォータニオン1
- qt2
- クォータニオン2
出力
- outQT
- 結果クォータニオン
【例】
入力
- qt1
- [1.0, 1.0, 1.0, 1.0]
- qt2
- [0.5, 2.0, 1.0, 0.0]
出力
- outQT
- [0.5, -1.0, 0.0, 1.0]
外積 (qtCross)
qtCross
KV

KV-X

KV-X
入力
- qt1
- クォータニオン1
- qt2
- クォータニオン2
出力
- outQT
- 結果クォータニオン
【例】
入力
- qt1
- [1.0, 1.0, 1.0, 1.0]
- qt2
- [0.5, 2.0, 1.0, 0.0]
出力
- outQT
- [-2.5, 1.5, 3.5, -0.5]
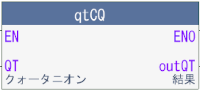
共役 (qtCQ)
qtCQ
KV
KV-X

KV-X
入力
- QT
- クォータニオン
出力
- outQT
- 結果クォータニオン
【例】
入力
- QT
- [0.5, 2.0, 1.0, 0.0]
出力
- outQT
- [0.5, -2.0, -1.0, 0.0]
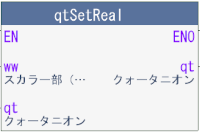
実部の設定 (qtSetReal)
qtSetReal
KV
KV-X
KV-X
入力
- ww
- スカラー部(実部)
- qt
- クォータニオン
出力
- qt
- 結果クォータニオン
【例】
入力
- ww
- 0.5
- qt
- [0.0, 0.0, 0.0, 0.0]
出力
- qt
- [0.5, 0.0, 0.0, 0.0]
虚部の設定 (qtSetImag)
qtSetImag
KV

KV-X

KV-X
入力
- vector
- ベクトル部(虚部)
- qt
- クォータニオン
出力
- qt
- 結果クォータニオン
【例】
入力
- vector
- [1.0, 2.0, 3.0]
- qt
- [0.0, 0.0, 0.0, 0.0]
出力
- qt
- [0.0, 1.0, 2.0, 3.0]
ダウンロード
keisanKVLib.kufb (ライブラリのみ)
このサイトが役に立ったと感じたら、ご支援いただけると嬉しいです