
2D
サンプル一覧
 |
 |
 |
 |
 |
 |
| 直角三角形 | 点で囲まれた多角形 | 三角形の内接円 | 三角形の外接円 | 正多角形の内接円 | 正多角形の外接円 |
 |
 |
 |
 |
 |
 |
| 2点間の距離と角度 | 2直線の交点と角度 | 原点を中心に回転 | 直交座標から極座標 | 極座標から直交座標 | 3点を通る円の中心 |
ファンクション
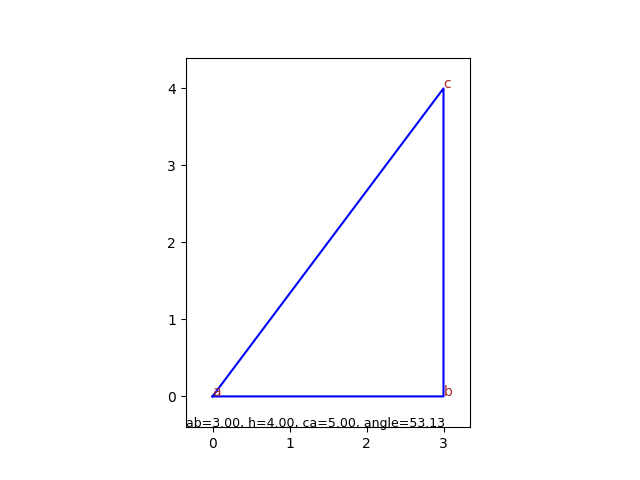
直角三角形 (RightTriangle)
辺ab、高さ、辺ca、aの角度のうち2つを入力して実行すると入力していない項目を算出して出力します

- ab
- 底辺の長さ
- h
- 高さ
- ca
- 斜辺の長さ
- angle
- 角度
- out_ab
- 底辺の長さ(出力)
- out_h
- 高さ(出力)
- out_ca
- 斜辺の長さ(出力)
- out_angle
- 角度(出力)
例

- ab
- 3.0
- h
- 4.0
- ca
- angle
- out_ab
- 3.0
- out_h
- 4.0
- out_ca
- 5.0
- out_angle
- 53.13
計算式
\begin{align} \theta =& angle*\frac{\pi}{180} \\ h =& ab \cdot tan\theta &= ca \cdot sin\theta \\ ab =& ca \cdot cos\theta \end{align}
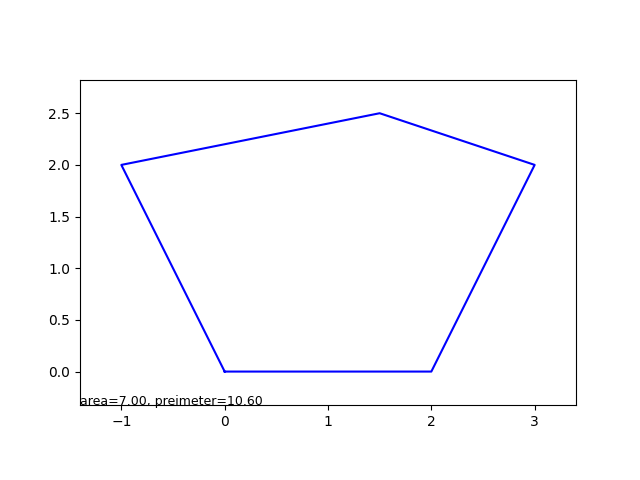
点で囲まれた多角形 (PolygonArea)
座標上の10点までの点を繋げた多角形の面積と外周を出力します

- points
- 点座標[x1,y1,x2,y2...]
- n
- 点数
- area
- 面積
- perimeter
- 外周
例

- poits
- [0.0,0.0] [2.0,0.0] [3.0,2.0] [1.5,2.5] [-1.0,2.0]
- n
- 5
- area
- 7.0
- perimeter
- 10.60
計算式
\[ area = \frac{1}{2} \left|\sum_{j=1}^{n} (x_{j}-x_{j+1})*(y_{j}+y_{j+1})\right| \] \[ perimeter = \sum_{j=1}^{n} \sqrt{(x_{j}-x_{j+1})^{2}+(y_{j}-y_{j+1})^{2}}\ \]
三角形の内接円 (TriangleInCircle)
3辺の長さを指定した三角形の内接円の半径と円の面積を出力します

- ab
- 辺1の長さ
- bc
- 辺2の長さ
- ca
- 辺3の長さ
- r
- 半径
- area
- 面積
例

- ab
- 3.0
- bc
- 4.0
- ca
- 5.0
- r
- 1.0
- area
- 3.14
計算式
\[ s = \frac{ab+bc+ca}{2} \] \[ r = \frac{\sqrt{s(s-ab)(s-bc)(s-ca)}}{s} \] \[ area = \pi r^{2} \]
三角形の外接円 (TriangleCircumCircle)
3辺の長さを指定した三角形の外接円の半径と円の面積を出力します

- ab
- 辺1の長さ
- bc
- 辺2の長さ
- ca
- 辺3の長さ
- r
- 半径
- area
- 面積
例

- ab
- 3.0
- bc
- 4.0
- ca
- 5.0
- r
- 2.5
- area
- 19.64
計算式
\[ s = \frac{ab+bc+ca}{2} \] \[ r = \frac{ab\cdot bc\cdot ca}{4\sqrt{s(s-ab)(s-bc)(s-ca)}} \] \[ area = \pi r^{2} \]
正多角形の内接円 (RegularPolygonInCircle)
辺の長さを指定した正多角形の内接円の半径と円の面積を出力します

- l
- 辺の長さ
- n
- 辺の数
- r
- 半径
- area
- 面積
例

- l
- 1.0
- n
- 5
- r
- 0.69
- area
- 1.49
計算式
\[ r = \frac{l}{2tan^{2}\frac{\pi}{n}} \] \[ area = \pi r^{2} \]
正多角形の外接円 (RegularPolygonCircumCircle)
辺の長さを指定した正多角形の外接円の半径と円の面積を出力します

- l
- 辺の長さ
- n
- 辺の数
- r
- 半径
- area
- 面積
例

- l
- 1.0
- n
- 5
- r
- 0.85
- area
- 2.27
計算式
\[ r = \frac{l}{2sin\frac{\pi}{n}} \] \[ area = \pi r^{2} \]
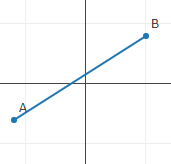
2点間の距離と角度 (LinearPtoP)

- p1
- 点1 [x,y]
- p2
- 点2 [x,y]
- distance
- 距離
- angle
- 角度
例

- p1
- [-6.0,-3.0]
- p2
- [5.0,4.0]
- distance
- 13.038
- angle
- 32.471
計算式
\[ distance = \sqrt{(p2_x-p1_x)^{2}+(p2_y-p1_y)^{2}} \] \[ angle = tan~{-1}\left( \frac{p2_y-p1_y}{p2_x-p1_x}\right) \]
計算式ではp1[0]を\(p1_x\)、p1[1]を\(p1_y\)と記述しています
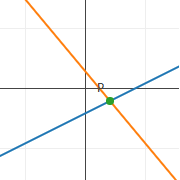
2直線の交点と角度 (Intersection)
- Line1
- 線1 [始点x,始点y,終点x,終点y]
- Line2
- 線2 [始点x,始点y,終点x,終点y]
- point
- 交点
- angle
- 角度
例

- Line1
- [-10, -7, 10, 3]
- Line2
- [-10, 13.4, 10, 10.6]
- point
- [2,-1]
- angle
- -76.759
計算式
L1を一次関数(ax+b)に変換
\[
\begin{align}
P1=&(L1[0,0],L1[0,1]) \\
P2=&(L1[1,0],L1[1,1]) \\
a1=&\frac{(P2_y-P1_y)}{(P2_x-P1_x)} \\
b1=&\frac{(P2_x*P1_y-P1_x*P2_y)}{(P2_x-P1_x)}
\end{align}
\]
L2も同様に一次関数(ax+b)に変換して\(a2,b2\)を算出
L1,L2から
\[
\begin{align}
point_x = &\frac{(b2-b1)}{(a1-a2)} \\
point_y = &a1*point_x+b1 \\
angle=&tan^{-1}\left(\frac{a2-a1}{1+a1*a2} \right)
\end{align}
\]
原点を中心に回転 (PointRotate)

- p
- 点 [x,y]
- angle
- 回転角度
- out_point
- 移動後の座標
例

- p
- [4, 4]
- angle
- 90.0
- out_point
- [-4, 4]
計算式
\[ \begin{align} \theta =& angle\frac{\pi}{180} \\ outp_x =& p_x*cos\theta-p_y*sin\theta \\ outp_y =& p_x*sin\theta+p_y*cos\theta \\ \end{align} \]
計算式ではp[0]を\(p_x\)、p[1]を\(p_y\)と記述しています
直交座標から極座標 (PolarCoordinates)
直交座標から極座標へ変換

- p
- 点 [x,y]
- length
- 長さ
- angle
- 角度
例

- p
- [1.0,0.8]
- length
- 1.28
- angle
- 38.66
計算式
\begin{align} length =& \sqrt{p_x^{2}+p_y^{2}} \\ \theta =& tan^{-1}\frac{p_y}{p_x} \\ angle =& \frac{180}{\pi}\theta \end{align}
計算式ではp[0]を\(p_x\)、p[1]を\(p_y\)と記述しています
\(\theta\) は下記で象限問題を避けられます。
\[\theta = atan2(p_y,p_x) \]
極座標から直交座標 (CartesianCoordinates)
極座標から直交座標へ変換

- length
- 長さ
- angle
- 角度
- p
- 点[x,y]
例
- length
- 2.0
- angle
- 30.0
- p
- [1.73,1.00]
計算式
\begin{align} \theta =& angle\frac{\pi}{180} \\ p_x =& length\cdot cos\theta \\ p_y =& length\cdot sin\theta \end{align}
計算式ではp[0]を\(p_x\)、p[1]を\(p_y\)と記述しています
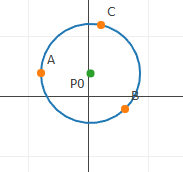
平面の3点を通る円の中心と半径を求める (GetCenter2D)
平面の3点を通る円の中心と半径を求める

- 点A
- 点A [x,y]
- 点B
- 点B [x,y]
- 点C
- 点C [x,y]
- p0
- 中心 [x,y]
- r
- 半径
例

- 点A
- [-4, 2]
- 点B
- [3, -1]
- 点C
- [1, 6]
- p0
- [0.128, 1.965]
- r
- 4.128
計算式
\[ a = \begin{bmatrix} A_x & A_y & 1 \\ B_x & B_y & 1 \\ C_x & C_y & 1 \end{bmatrix} \] \[ bx = \begin{bmatrix} A_x^{2}+A_y^{2} & A_y & 1 \\ B_x^{2}+B_y^{2} & B_y & 1 \\ C_x^{2}+C_y^{2} & C_y & 1 \end{bmatrix} \] \[ by = \begin{bmatrix} A_x^{2}+A_y^{2} & A_x & 1 \\ B_x^{2}+B_y^{2} & B_x & 1 \\ C_x^{2}+C_y^{2} & C_x & 1 \end{bmatrix} \] \begin{align} p0_x=&-\left(\frac{bx}{2a}\right) \\ p0_y=&-\left(\frac{by}{2a}\right) \\ r=&\sqrt{(A_x-p0_x)^2+(A_y-p0_y)^2} \end{align}
計算式ではA[0]を\(A_x\)、A[1]を\(A_y\)と記述しています