
2021/10/31
計算ライブラリ サンプル集
本ページではOMRON NX/NJシリーズ向けの計算ライブラリを公開しています。
2D幾何計算、3D座標計算、ベクトル演算、行列演算、クォータニオン、姿勢制御などのサンプルをダウンロードできます。
サンプル一覧
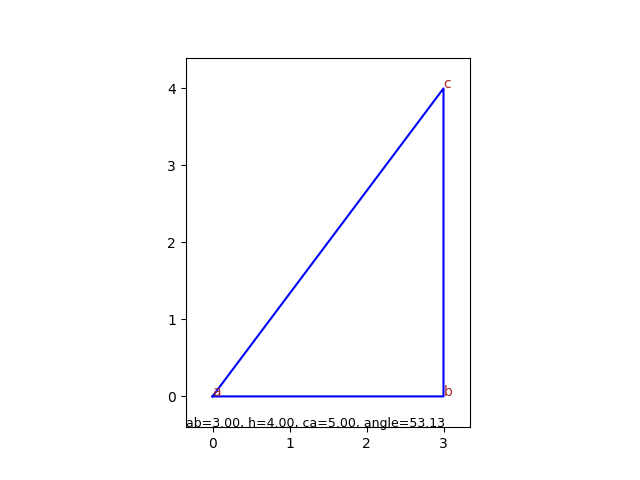
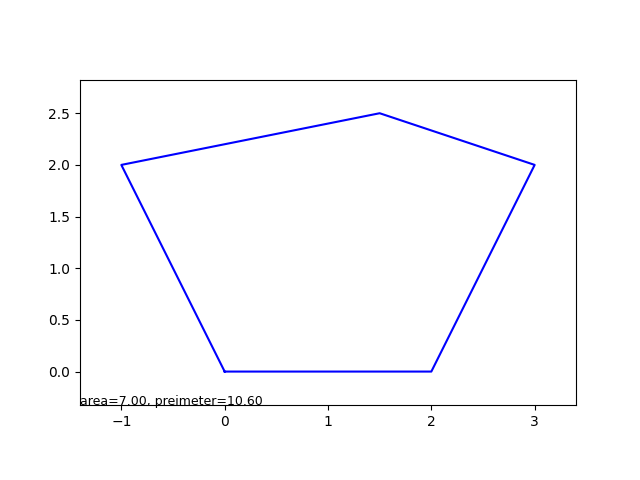
2D計算






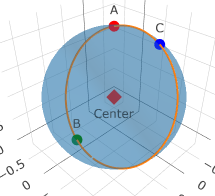
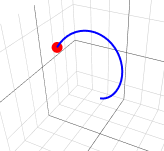
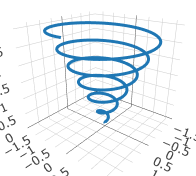
3D計算


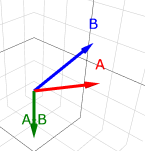
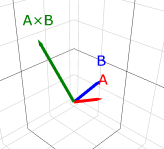
ベクトル

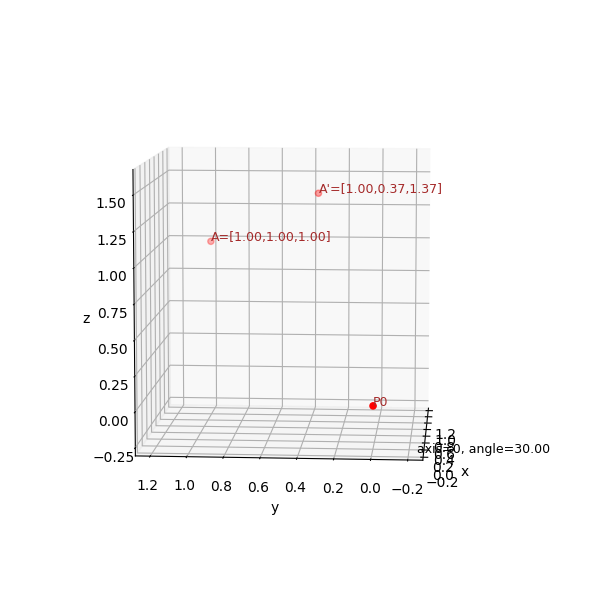
回転の相互変換
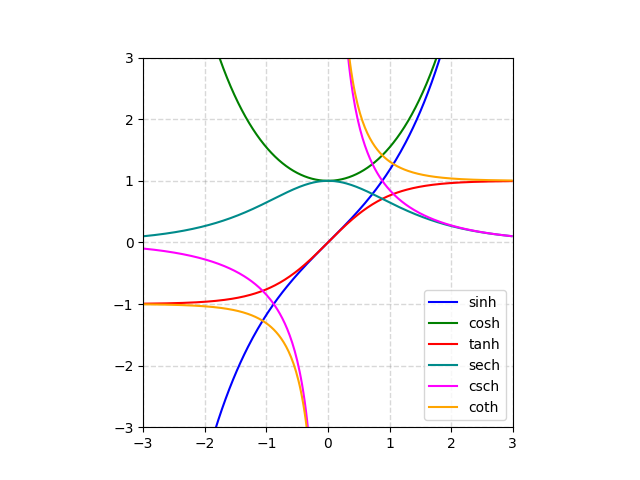
双曲線関数/逆双曲線関数

行列

クォータニオン

その他
姿勢制御
ダウンロード
ダウンロードされたときは利用規約に同意したものとみなします
pythonでグラフ表示
計算ライブラリの結果をグラフ表示するPython3のプログラムはpythonTestView.zip
Pythonのライブラリはsocket, numpy, matplotlibを使っていますのでインストールしてください
[グラフで確認する方法]
PLCとPCをEthernetで接続した状態で、
PLCでは ”計算ライブラリ ソース (keisan.csm2)” を実行して、ラダーの実行したいプログラムのトリガーをONにすることで計算結果をPCの読み取りエリアにセットします
PCでは"Plot2D_fins.py"など該当するプログラムを実行するとPLCの値を読み出してグラフ表示します
| 2D | Plot2D_fins.py |
| 3D | Plot3D_fins.py |
| ベクトル | vector3D_fins.py |
| 双曲線関数 / 逆双曲線関数 | graph_fins.py |
このサイトが役に立ったと感じたら、ご支援いただけると嬉しいです
関連サンプル
| python3d | オイラー角、クオータニオンをPythonで計算するサンプル | |
| FinsCommand | FinsコマンドをUDPで送受信するサンプル |