
3D
このライブラリでできること
本ライブラリではOMRON NX/NJシリーズで利用できる3次元幾何演算を提供します。 ロボット制御、ビジョン補正、座標変換、円弧補間などに利用できます。
サンプル一覧


2点の距離 (distance3D)
空間座標上の2点の距離を算出

- pointA
- 点A [x,y,z]
- pointB
- 点B [x,y,z]
- distance
- 2点間の距離
例

- A
- [8, 2, 2]
- B
- [2, 7, 9]
- distance
- 10.488
計算式
\[ distance = \sqrt{(B_x-A_x)^2+(B_y-A_y)^2+(B_z-A_z)^2} \]
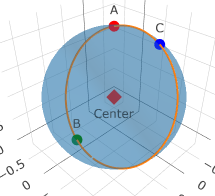
3点を通る円の中心 (getCenter3D)
空間の3点を通る円の中心を算出

- A
- 点A [x,y,z]
- B
- 点B [x,y,z]
- C
- 点C [x,y,z]
- P0
- 中心 [x,y,z]
例

- A
- [0, 0, 2]
- B
- [1, 0, 0]
- C
- [0, 1, 2]
- P0
- [0.5, 0.5, 1.0]
計算式
\begin{align} \overrightarrow{AB}=& \begin{pmatrix} B_x-A_x \\ B_y-A_y \\ B_z-A_z \end{pmatrix} \\ \overrightarrow{AC}=& \begin{pmatrix} C_x-A_x \\ C_y-A_y \\ C_z-A_z \end{pmatrix} \\ \overrightarrow{ABAC}=&\overrightarrow{AB}\times \overrightarrow{AC} \\ \end{align} 3元連立方程式を解きます \[ \begin{bmatrix} 2AB_x & 2AB_y & 2AB_z \\ 2AC_x & 2AC_y & 2AC_z \\ ABAC_x & ABAC_y & ABAC_z \end{bmatrix} \begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} B^2-A^2 \\ C^2-A^2 \\ ABAC\cdot A \end{bmatrix} \] \(\times \) は外積(クロス積)
X Y Z 軸で回転 (matRotateXYZ)
空間の3点を通る円の中心を算出
X軸で回転
Y軸で回転
Z軸で回転

- point
- 回転前の座標 [x,y,z]
- axis
- 回転軸 0=X 1=Y 2=Z
- angle
- 回転角度
- out
- 移動後の座標 [x,y,z]
例
- point
- [1.2, 0.8, 0.5]
- axis
- 0(X軸)
- angle
- 270.0
- out
- [1.2, 0.5, -0.8]
計算式
X軸周り \[ out= \begin{bmatrix} 1 & 0 & 0 \\ 0 & cos{\theta} & -sin{\theta} \\ 0 & sin{\theta} & cos{\theta} \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ \end{bmatrix} \] Y軸周り \[ out= \begin{bmatrix} cos{\theta} & 0 & sin{\theta} \\ 0 & 1 & 0 \\ -sin{\theta} & 0 & cos{\theta} \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ \end{bmatrix} \] Z軸周り \[ out= \begin{bmatrix} cos{\theta} & -sin{\theta} & 0 \\ sin{\theta} & cos{\theta} & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ \end{bmatrix} \]
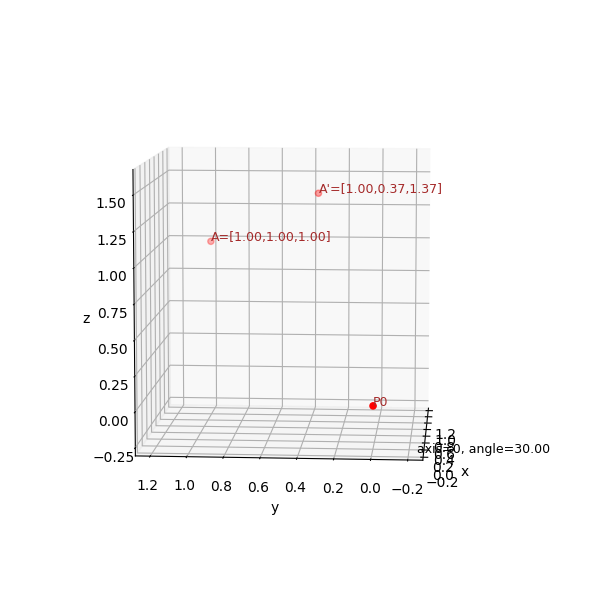
オイラー角での回転 (Euler)
オイラー角を回転行列に変換(EulerToMatrix)して回転(matRotate3D)

- point
- 回転前の座標 [x,y,z]
- mat
- 回転行列
- out
- 移動後の座標 [x,y,z]
# この動画は計算の手順をイメージするもので実際の計算は最初の位置から最後の位置を直接算出します
例

- EulerAngles
- [30,30,0]
- order
- XYZ
- mat
- 行列
- point
- [1.0, 1.0, 1.0]
- mat
- 行列
- out
- [1.37, 0.68, 0.82]
計算式
\[ out= \begin{bmatrix} m00 & m01 & m02 \\ m10 & m11 & m12 \\ m20 & m21 & m22 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ \end{bmatrix} \]
クォータニオンで回転 (qtRotate)

- vector
- 回転軸の方向ベクトル [x,y,z]
- point
- 回転前の座標 [x,y,z]
- angle
- 回転角度
- out
- 移動後の座標 [x,y,z]
例
- vector
- [-0.2, 1.0, 1.0]
- point
- [1.2, 1.0, 0.5]
- angle
- 270.0
- out
- [0.227, -0.293, 1.598]
計算式
元のベクトル
\[
Q1=
\begin{bmatrix}
q_w \\
q_x \\
q_y \\
q_z \\
\end{bmatrix}
=
\begin{bmatrix}
0 \\
x \\
y \\
z \\
\end{bmatrix}
=
\begin{bmatrix}
0 \\
point.x \\
point.y \\
point.z \\
\end{bmatrix}
\]
回転軸(単位ベクトル)
\[
T=
\begin{bmatrix}
vector.x \\
vector.y \\
vector.z \\
\end{bmatrix}
\]
回転を表すクォータニオン
\[
R=
\begin{bmatrix}
q_w \\
q_x \\
q_y \\
q_z \\
\end{bmatrix}
=
\begin{bmatrix}
cos\frac{\theta}{2} \\
sin\frac{\theta}{2} T_x \\
sin\frac{\theta}{2} T_y \\
sin\frac{\theta}{2} T_z \\
\end{bmatrix}
\]
回転の計算
\[
out = R \times Q1 \times \bar{R}
\]
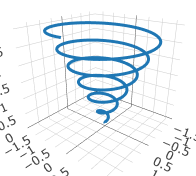
螺旋 (spiral)
- angle
- 回転角度
- dx
- 1周で増加するX軸方向の距離
- dz
- 1周で増加するZ軸方向の距離
- stype
- 種類
- out
- 移動後の座標 [x,y,z]
例
コイル
半径10で1回転にZ軸に10上に伸びるコイル形状の座標を求める例です
0度から1800度までを計算すると上記の「コイル」の図形が描けます

- angle
- 0から1800
- dx
- 10.0
- dz
- 10.0
- stype
- 0
- out
- 0-1800度の座標 [x,y,z]
-
等間隔で広がる螺旋
上記の【例 コイル】のstypeを1に変更すると「等間隔で広がる」の図形が描けます - 平方根で広がる螺旋
上記の【例 コイル】のstypeを2に変更すると「平方根で広がる」の図形が描けます - 指数関数で広がる螺旋
上記の【例 コイル】のstypeを3に変更すると「指数関数で広がる」の図形が描けます
計算式
\begin{align} \theta = \frac{\pi}{180} \times Angle \\ r= \frac{dx}{360} \\ h= \frac{dz}{360} \end{align} コイル \begin{align} x= r \times \cos\theta \\ y= r \times \sin\theta \\ z= h \times Angle \end{align} 等間隔 \begin{align} x= r\theta \times cos\theta \\ y= r\theta \times sin\theta \\ z = h \times Angle \end{align} 平方根 \begin{align} x= r \sqrt{\theta} \times cos\theta \\ y= r \sqrt{\theta} \times sin\theta \\ z = h \times Angle \end{align} 指数関数 \begin{align} a= 1.1 \\ x= r \times a^{\theta} \times cos\theta \\ y= r \times a^{\theta} \times sin\theta \\ z = h \times Angle \end{align}
よくある質問
このライブラリで何ができますか?
OMRON NX/NJシリーズで利用できる3次元幾何演算を提供します。距離計算、3点を通る円の中心計算、回転行列、オイラー角、クォータニオン、螺旋座標計算などに対応しています。
どのような用途に利用できますか?
ロボット制御、ビジョン補正、座標変換、円弧補間などの3次元座標計算に利用できます。